2022-11-18 19:56:00 来源:网络 阅读量:10282 会员投稿
今年7月,清华大学猛狮团队、蘑菇车联合作的两项研究成果被ICRA 2022录用为大会论文。ICRA(全称为“IEEE Conference on Robotics and Automation”)被认为是机器人领域最有影响力的国际学术会议。
今年大会共收到3344份投稿,其中的3263份进入审稿阶段,1428篇被接收,接收率为43.1%。

ICRA是业界公认的人工智能领域最有影响力的国际学术会议
清华大学猛狮团队、蘑菇车联此次被接收的两项研究成果包含:路侧赋能感知领域所构建的数据采集系统以及对应开源的首批路侧多模态目标检测数据集。研究组针对城市复杂路口场景车辆仅凭借单车感知存在明显盲区与安全隐患这一问题,从路侧赋能感知角度出发,构建了一套路侧分布式、可扩展的多模态感知系统,并设计完成了整套系统的时空同步与配准算法,使得整套分布式系统的数据采集时延在8ms以内,这大概是人类驾驶员反应时间的四十分之一。
路端感知数据能够弥补单车感知的不足,帮助自动驾驶车辆在暴雨、黑夜、视野被遮挡等情况下实现安全行驶,这种车、路融合的技术方案在业内被称为“单车智能+车路协同”。蘑菇车联基于这一技术方案率先提出了“车路云一体化”系统级方案,并围绕“车路云一体化”与清华大学推动行业技术进步。

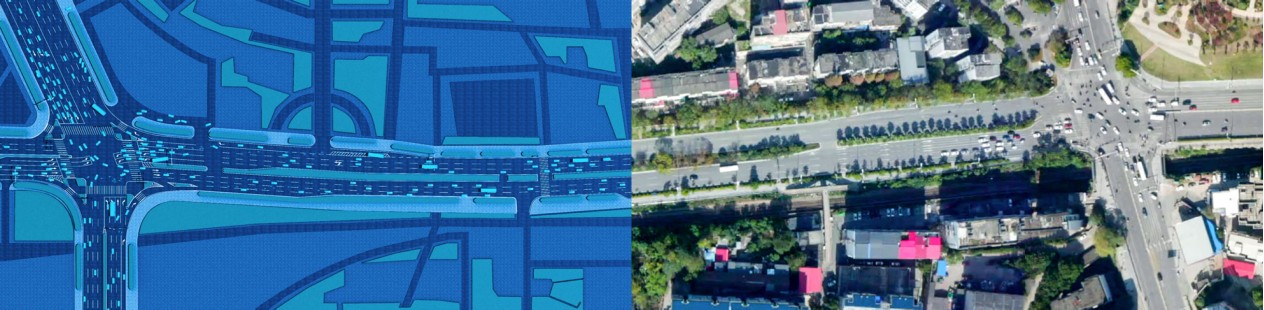
数据采集路段车流密度大
研究组此次开源的数据集为业界首个城市复杂路口场景下的路侧感知数据集。该数据集依托于北京五道口的真实行车场景,标注半径达300m,平均单帧目标数达319.84,为复杂真实场景下的路侧赋能感知研究任务提供了宝贵的研究数据。五道口曾被称为“宇宙中心”,多所大学、研究机构、商场等汇聚于此,人流、车流丰富。

搭载蘑菇自动驾驶大脑的MOGO BUS
清华猛狮智能车团队由清华大学车辆与运载学院和清华大学计算科学与技术系人员组成,深耕在无人驾驶一线。实验室掌握智能驾驶汽车体系架构基于视觉感知的智能驾驶解决方案、基于视觉-雷达融合的跨模态场景检索与识别、基于社会属性深度强化学习的类人决策方法、室内环境建模、红外目标检测与跟踪等核心技术。
蘑菇车联车路云一体化系统中的交通数字孪生
蘑菇车联是“车路云一体化”方案的提出者和先行者,拥有全栈自研的自动驾驶系统方案,具备新型道路基础设施建设、构建城市级智慧交通数字底座的技术能力,和城市级自动驾驶公共服务车队运营能力。目前,蘑菇车联项目已在北京、江苏、湖南、河南、云南、四川等落地。

蘑菇车联自动驾驶实现复杂目标识别
蘑菇车联与清华大学已在自动驾驶、智慧交通领域开展多项合作。除李骏院士以及猛狮团队合作项目外,蘑菇车联还携手清华x-lab(清华大学创意创新创业教育平台)推出联合创新实践教育项目——清华x-lab&蘑菇车联自动驾驶联合挑战实验室,推动产教融合;去年8月,蘑菇车联自动驾驶环卫车驶入清华校园,为后者提供清洁、低碳的教学和生活环境。

下载科技观察客户端